









Популярная статья
Самолётная схема и VTOL решают разные задачи: выбор зависит от маршрута, площадки, полезной нагрузки и требований к эксплуатации.
Содержание статьи

Интеграцию автономной системы часто сводят к установке автопилота или полезной нагрузки. В действительности это процесс согласования всех подсистем: платформы, питания, навигации, связи, вычислителя, сенсоров, наземной станции и логики миссии.
Цель интеграции — не собрать оборудование в корпусе, а получить систему, которая выполняет прикладную задачу устойчиво, повторяемо и безопасно. Поэтому AERIS рассматривает интеграцию как полный инженерный цикл.
Начало проекта — описание результата. Что система должна делать самостоятельно? Где оператор остаётся в контуре? Какие решения можно принимать на борту, а какие должны подтверждаться человеком?
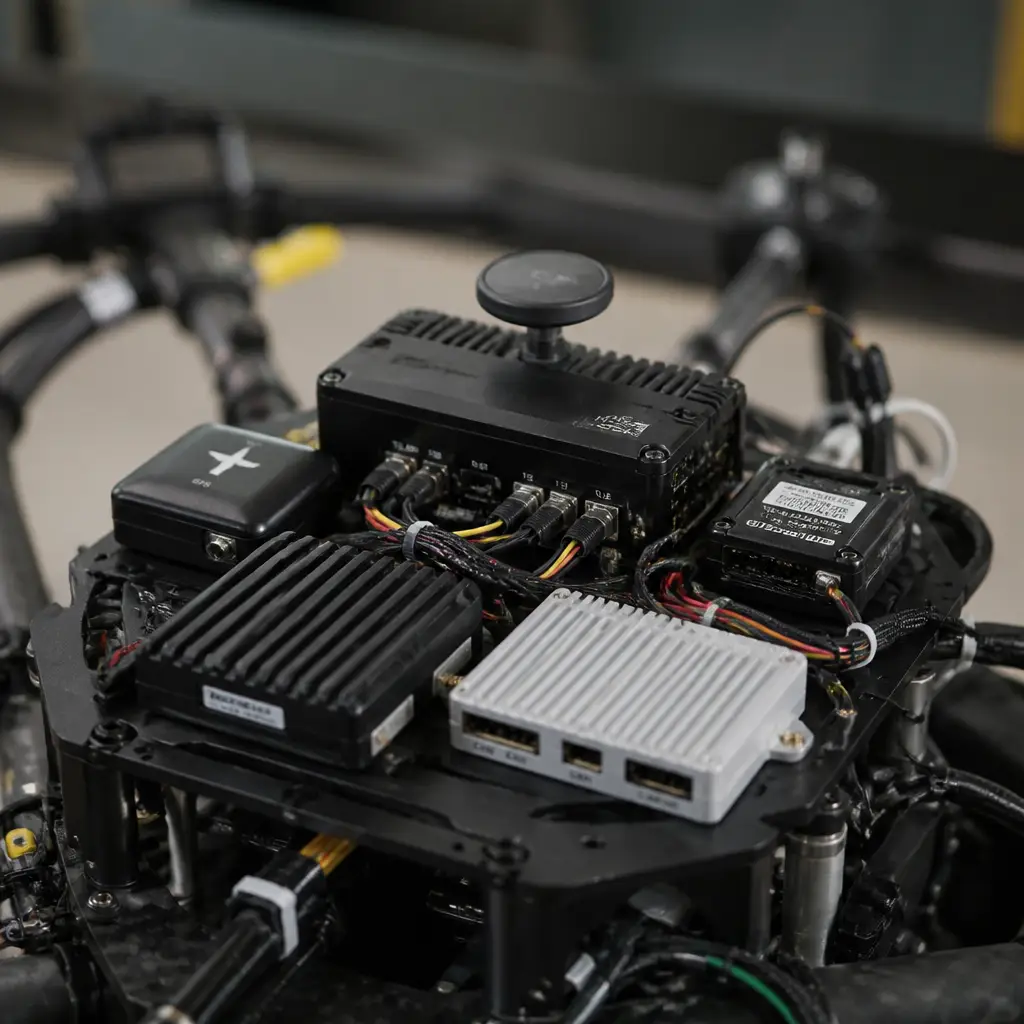
Интегрированная система включает автопилот, бортовой компьютер, сенсоры, полезную нагрузку, каналы связи, питание, GCS, инструменты диагностики и документацию.
Ограничения интеграции связаны с массой, энергией, совместимостью интерфейсов, задержками и отказоустойчивостью.
Проект обычно проходит этапы: бриф, архитектура, стендовая сборка, интеграция ПО, наземные проверки, тестовые полёты, настройка регламентов и передача в эксплуатацию.
На каждом этапе важно сохранять трассируемость требований: почему выбран сенсор, какой интерфейс используется, как проверяется результат и что считается готовностью.
Интеграционные ошибки часто проявляются поздно.
Перед стартом интеграции нужно иметь:
Практический вывод: интеграция автономной системы — это управление связями между подсистемами. Чем раньше эти связи описаны, тем меньше переделок на испытаниях.
Готовность автономной системы лучше подтверждать не общим впечатлением от полёта, а набором проверяемых критериев: устойчивость связи, корректность команд полезной нагрузки, полнота телеметрии, журналирование событий, реакция на деградацию сенсора и воспроизводимость результата при повторной миссии. Такой подход помогает отделить демонстрационный успех от инженерной готовности к эксплуатации.
Популярная статья
Самолётная схема и VTOL решают разные задачи: выбор зависит от маршрута, площадки, полезной нагрузки и требований к эксплуатации.

Популярная статья
Модульная архитектура позволяет развивать БАС без полной переработки: менять сенсоры, вычислители, ПО и сценарии миссий.



