Популярная статья
Компьютерное зрение в БАС важно оценивать не как “нейросеть на борту”, а как часть миссии: сенсор, вычислитель, данные и проверка результата.
Содержание статьи
Полезную нагрузку часто выбирают по короткой формулировке: «нужна камера», «нужен тепловизор», «нужен лидар». На практике такой подход почти всегда неполный. Для БАС важна не сама камера, а результат миссии: какие данные нужно получить, с какой детализацией, в каких условиях, за какое время и в каком виде эти данные должны попасть к оператору или в аналитическую систему.
Правильный подбор начинается с инженерного брифа. Полезная нагрузка влияет не только на качество съёмки, но и на массу платформы, центровку, энергопотребление, время полёта, канал связи, требования к подвесу, виброизоляцию, наземную обработку и обслуживание. Поэтому рабочую связку «платформа + нагрузка + вычислитель + связь + сценарий полёта» лучше рассматривать как единую проектную конфигурацию.
Первый вопрос звучит не «какую камеру поставить?», а «какое решение должен принять заказчик после миссии?». Если после вылета нужно увидеть трещины на конструкции, это одна конфигурация. Если нужно найти перегретые элементы, это другая. Если задача — построить карту рельефа или модель объекта, требования будут третьими.
Перед выбором оборудования полезно зафиксировать пять параметров:
Когда эти параметры понятны, выбор нагрузки становится технической задачей, а не сравнением рекламных характеристик.
Обычная фото- или видеокамера подходит для визуального мониторинга, инспекции объектов, документирования состояния площадок, обзорной съёмки и фотограмметрии. Важны не только мегапиксели, но и размер матрицы, оптика, выдержка, стабилизация, геопривязка кадров и возможность выдерживать нужную скорость полёта без смаза.
Тепловизионная нагрузка нужна, когда важна не форма объекта, а температурный контраст: перегрев оборудования, теплопотери, поиск людей или животных, контроль инфраструктуры. Для таких задач критичны радиометрия, разрешение матрицы, частота кадров, температурная чувствительность, калибровка и корректная интерпретация данных. Тепловизор не заменяет обычную камеру: часто нужна связка RGB + IR.
Такая нагрузка используется, когда нужно анализировать отражение в отдельных спектральных диапазонах: состояние растительности, стресс, влажность, неоднородности покрытия, экологические признаки. Здесь важно заранее понимать методику: какие индексы нужны, нужна ли калибровочная панель, как будет обеспечиваться повторяемость съёмки и кто будет интерпретировать результат.
Лидар выбирают для задач, где нужна геометрия: рельеф, просеки, линии, объёмные модели, сложные объекты и участки с растительностью. Его нельзя оценивать отдельно от GNSS/INS, синхронизации времени, плотности точек, скорости полёта и траектории. Лидарная миссия часто требует более строгой интеграции, чем обычная видеосъёмка.
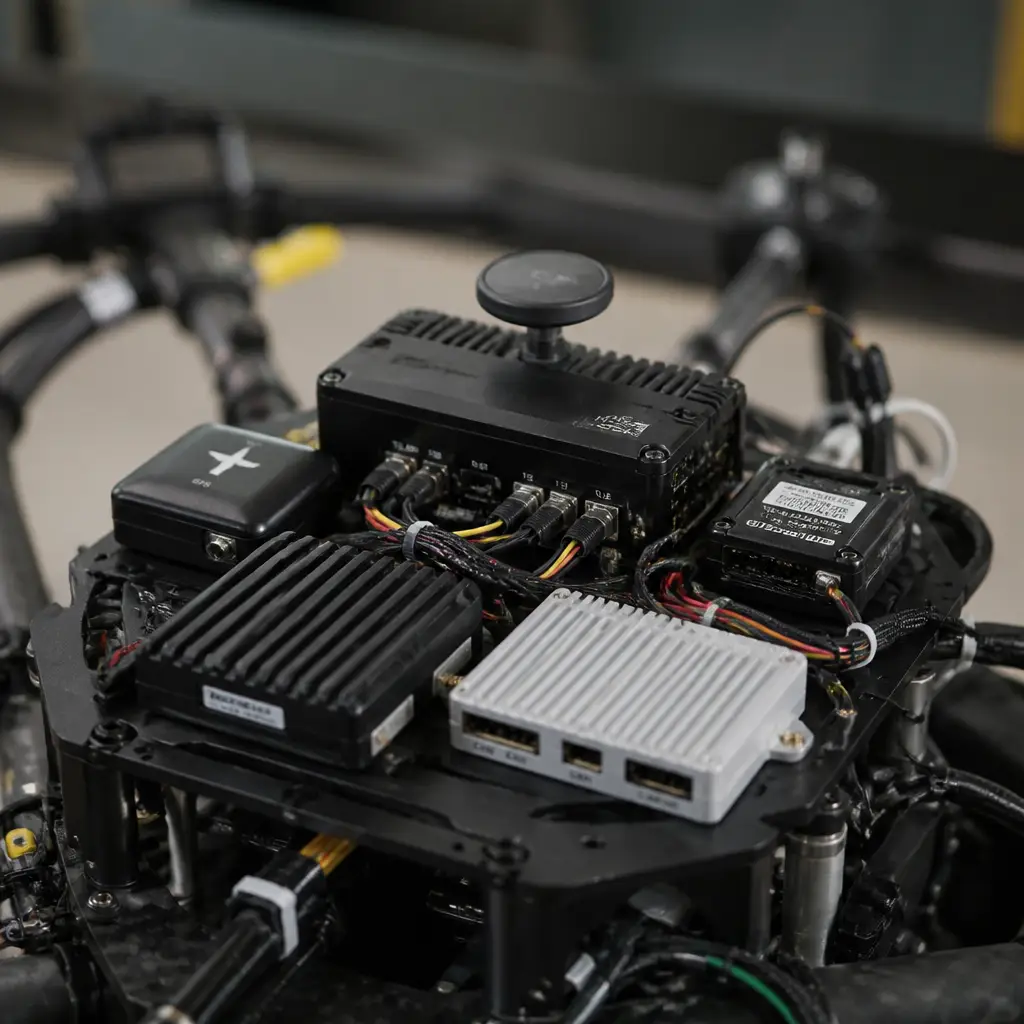
Иногда полезная нагрузка — это не только сенсор, но и вычислительный модуль. Он нужен для предварительной обработки данных, компьютерного зрения, обнаружения событий, работы без устойчивого канала связи или передачи не всего потока, а уже отфильтрованных результатов. При этом вычислитель добавляет массу, потребление, тепловыделение и требования к программной архитектуре.
Даже подходящий сенсор может оказаться неподходящим для конкретной платформы. В интеграции полезной нагрузки обычно проверяют не один параметр, а набор ограничений.
Если эти ограничения не проверить заранее, проект может прийти к неприятной ситуации: сенсор куплен, но платформа не даёт нужной продолжительности полёта, канал связи не держит поток, а монтаж мешает обслуживанию.
Полезная нагрузка меняет поведение БАС. Увеличение массы сокращает время полёта и запас по ветру. Крупный подвес влияет на аэродинамику. Высокое энергопотребление требует пересмотра питания. Тяжёлый вычислитель может потребовать охлаждения. Лидар или камера высокого разрешения могут изменить требования к скорости, высоте и повторяемости маршрута.
Поэтому платформу нужно выбирать после понимания нагрузки, а не наоборот. Для протяжённого мониторинга может быть важна самолётная схема. Для точечной инспекции и зависания — мультиротор. Для комбинированных задач — VTOL. Но в каждом случае решение зависит от результата миссии, а не от универсальной таблицы характеристик.
Перед подбором полезной нагрузки полезно собрать короткий инженерный бриф:
В AERIS мы рассматриваем полезную нагрузку как часть всей системы: платформы, бортового ПО, навигации, связи, наземного контура и эксплуатационного сценария. Если нужно подобрать рабочую связку нагрузки с платформой, лучше обсуждать её не как отдельную покупку камеры, а как проектную конфигурацию под конкретную задачу.
Практичный следующий шаг: сформулируйте результат, который должна дать миссия, и ограничения площадки. После этого можно выбрать тип нагрузки, оценить совместимость с платформой и заранее увидеть риски интеграции.
Популярная статья
Компьютерное зрение в БАС важно оценивать не как “нейросеть на борту”, а как часть миссии: сенсор, вычислитель, данные и проверка результата.

Популярная статья
Корпус БЛА нужно выбирать по полезной нагрузке, внутренней компоновке, сервисному доступу и требованиям миссии, а не только по форме.