Популярная статья
Регулярная эксплуатация БАС требует регламентов, чек-листов, обслуживания и понятного контура данных, а не только готового аппарата.
Содержание статьи
Спутниковая навигация удобна, но не всегда доступна. Сигнал может деградировать в городской застройке, возле металлоконструкций, в ущельях, помещениях, под кронами или при помехах. Поэтому для ответственных миссий БАС нужна архитектура, которая не зависит от одного источника координат.
Навигация без GNSS не означает магическую автономность. Это набор датчиков и алгоритмов, которые оценивают положение относительно среды, траектории, карты или стартовой точки. Такая система требует проектирования, настройки и испытаний.
Сначала нужно понять, зачем системе работать без GNSS: продолжить маршрут при кратковременной потере сигнала, выполнять миссию в закрытой зоне, сохранять устойчивость при помехах или обеспечить точное позиционирование относительно объекта.
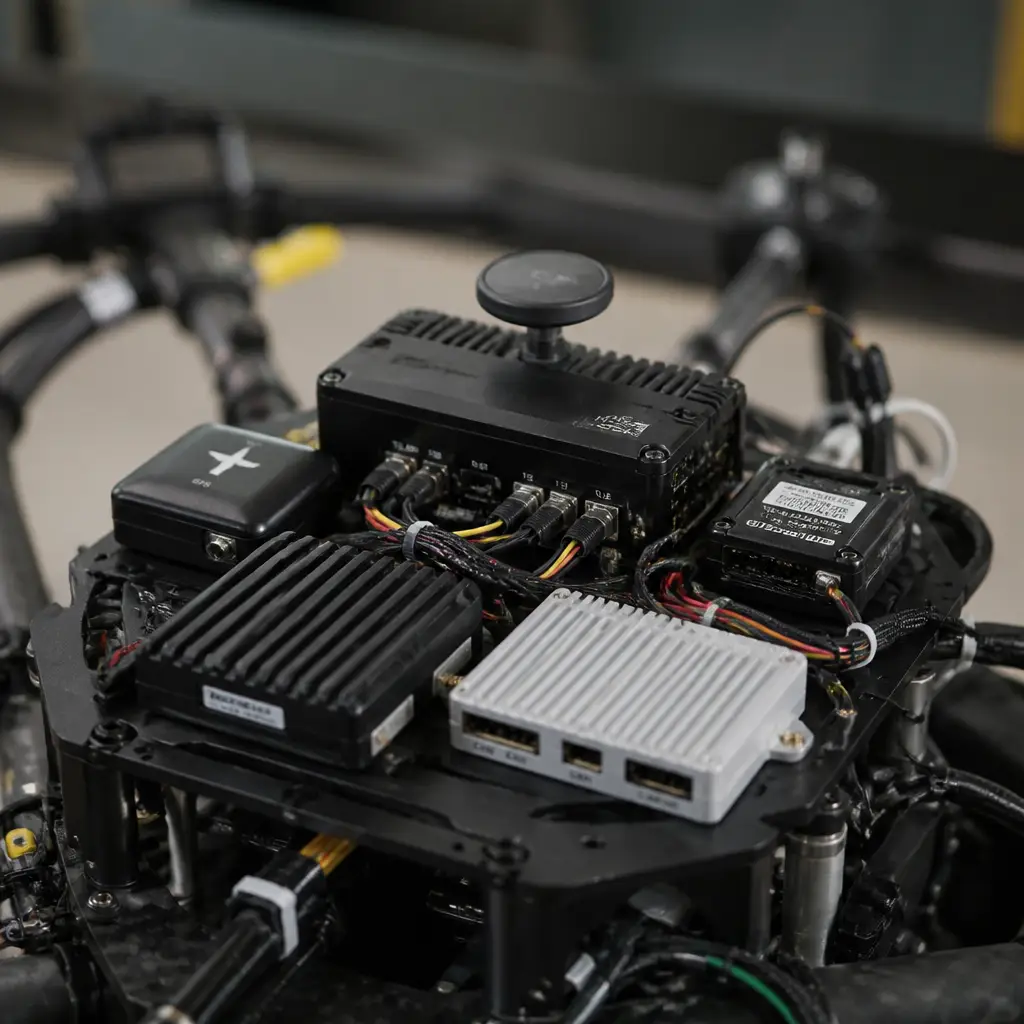
Обычно используются IMU, барометр, магнитометр, камера, оптический поток, лидар, высотомер, карта местности и алгоритмы sensor fusion. Каждый источник даёт неполную информацию, а задача системы — собрать устойчивую оценку положения.
Главный риск — накопление ошибки и деградация отдельных датчиков.
В рабочем проекте навигация без GNSS проверяется поэтапно: стенд, короткие полёты, сценарии деградации, контроль ошибки, аварийные режимы и только потом регулярная миссия.
Для оператора важно видеть не только координату, но и доверие к навигации. Если система понимает, что качество оценки падает, она должна перейти в безопасный режим, а не продолжать миссию как будто всё штатно.
Ошибки возникают, когда GNSS-free рассматривают как отдельную галочку в характеристиках.
Перед внедрением нужно описать:
Практический вывод: навигация без GNSS требует системной архитектуры. Надёжность появляется не от одного датчика, а от сочетания сенсоров, алгоритмов и проверенных сценариев отказа.
Популярная статья
Регулярная эксплуатация БАС требует регламентов, чек-листов, обслуживания и понятного контура данных, а не только готового аппарата.

Популярная статья
Компьютерное зрение в БАС важно оценивать не как “нейросеть на борту”, а как часть миссии: сенсор, вычислитель, данные и проверка результата.