Популярная статья
Полезную нагрузку для БАС нужно выбирать от результата миссии: какие данные нужны, с какой точностью, в каких условиях и на какой платформе.
Содержание статьи

Компьютерное зрение в БАС часто воспринимают как универсальную функцию: поставить камеру, добавить нейросеть и получать автоматические ответы. В реальном проекте всё сложнее. Алгоритм работает только тогда, когда сенсор, оптика, стабилизация, вычислитель, освещение, высота полёта и метод проверки результата согласованы между собой.
Для AERIS компьютерное зрение — это не отдельный модуль, а часть воздушной роботизированной системы. Оно должно помогать миссии: находить дефекты, выделять объекты, считать изменения, помогать навигации или сокращать объём данных, который оператору приходится просматривать вручную.
Начинать нужно с вопроса, какое решение должно быть принято после обработки изображения. Для мониторинга инфраструктуры важны признаки дефектов. Для охраны периметра — обнаружение объектов и событий. Для навигации — устойчивые ориентиры и оценка положения. Для инспекции — повторяемость съёмки и возможность сравнить состояние объекта во времени.
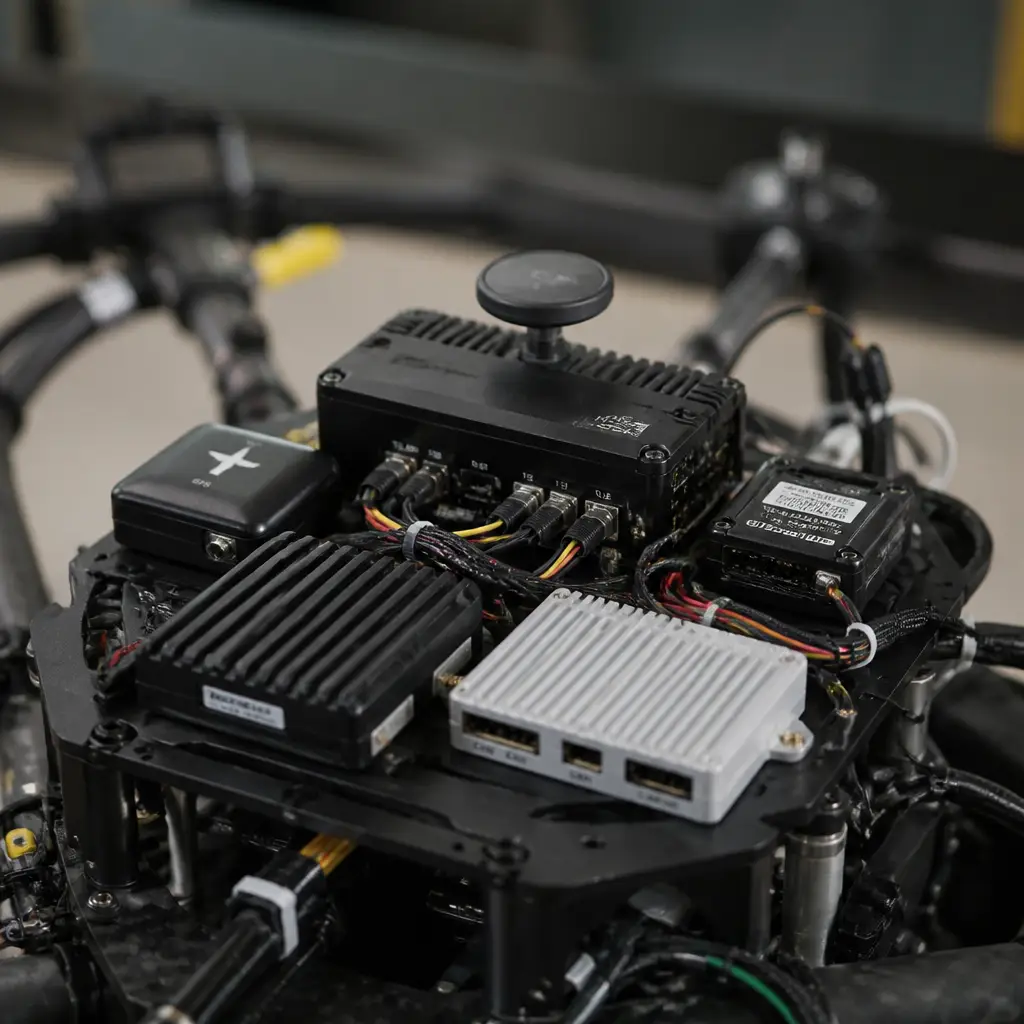
Рабочая система компьютерного зрения состоит из камеры, подвеса или крепления, бортового вычислителя, программной модели, канала связи и процедуры валидации. Если хотя бы одна часть выбрана неправильно, качество всей системы падает.
Главные ограничения компьютерного зрения на БАС связаны с массой, питанием, теплом, каналом данных и изменчивостью среды.
В реальной эксплуатации компьютерное зрение должно быть встроено в маршрут. Платформа летит с заданной высотой и скоростью, камера получает предсказуемый кадр, алгоритм выделяет признаки, а оператор получает не поток “на посмотреть”, а понятные события или зоны внимания.
Для промышленных задач особенно важна повторяемость: если миссия выполняется регулярно, система должна давать сопоставимые данные. Поэтому маршрут, настройки камеры, формат отчёта и контроль качества должны быть описаны заранее.
Большинство ошибок возникает из-за попытки купить “AI-камеру” без проектирования сценария.
Перед проектом полезно ответить на несколько вопросов.
Практический вывод: компьютерное зрение имеет смысл внедрять как связку сенсора, вычислителя, данных и эксплуатационного процесса. Тогда БАС становится не просто носителем камеры, а инструментом принятия решений.
Популярная статья
Полезную нагрузку для БАС нужно выбирать от результата миссии: какие данные нужны, с какой точностью, в каких условиях и на какой платформе.
Популярная статья
Корпус БЛА нужно выбирать по полезной нагрузке, внутренней компоновке, сервисному доступу и требованиям миссии, а не только по форме.