










Популярная статья
Интеграция автономной системы БАС объединяет платформу, сенсоры, бортовое ПО, связь, испытания и эксплуатационный сценарий.
Содержание статьи

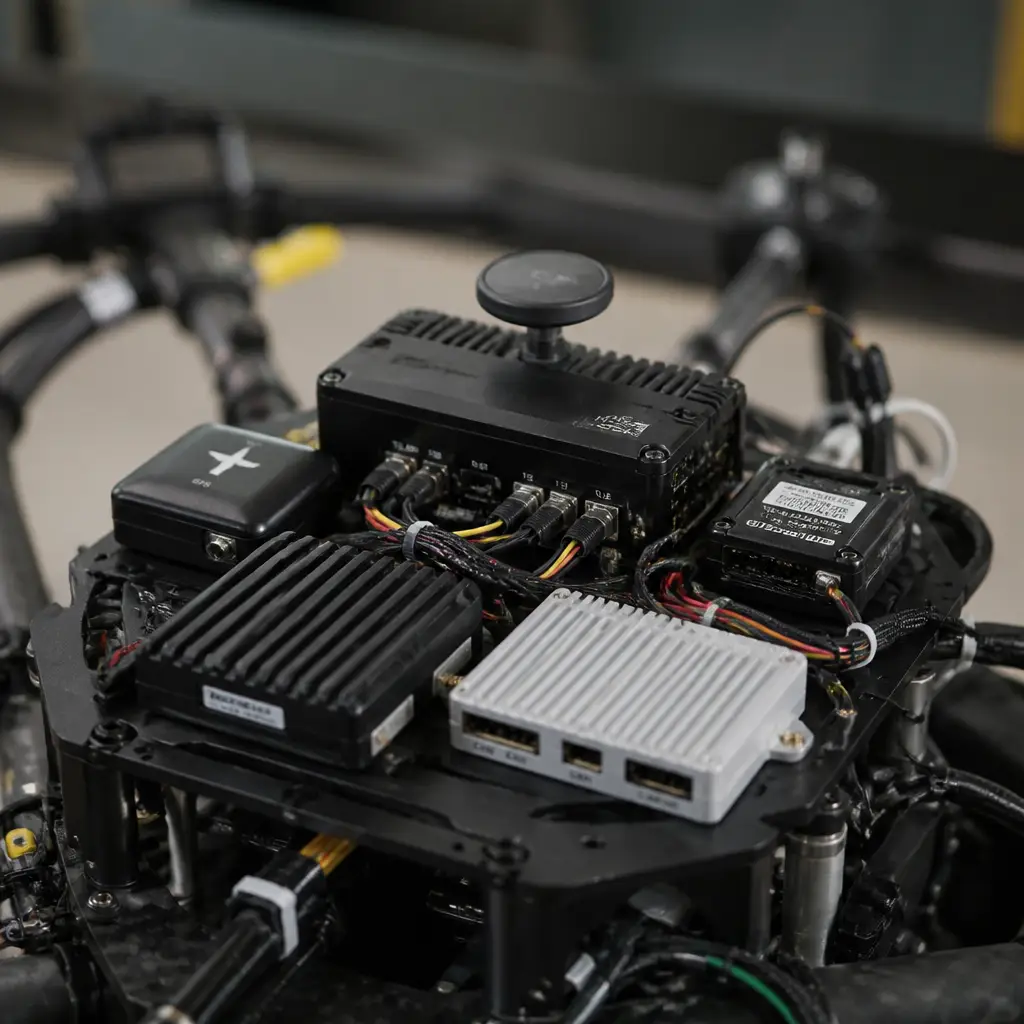
Современный БАС — это не один летательный аппарат, а система из платформы, питания, сенсоров, полезной нагрузки, связи, бортового ПО и наземного контура. Модульная архитектура нужна, чтобы развивать такую систему без полной переработки проекта при каждой новой задаче.
Для AERIS модульность означает понятные интерфейсы и границы ответственности. Если модуль можно заменить, но неизвестно, как он питается, обменивается данными и диагностируется, это не модульность, а риск.
Модульный подход особенно полезен, когда у заказчика меняются миссии: сегодня требуется визуальная инспекция, завтра тепловизионный контроль, позже — компьютерное зрение или другой канал связи.
Архитектура делится на уровни: платформа, энергетика, вычисления, сенсоры, связь, миссионная логика и наземное ПО. Каждый уровень должен иметь ясные интерфейсы.
Модульность имеет цену: запас по массе, место, документация и дополнительные проверки.
Развитие модульной системы идёт итерациями: базовая конфигурация, испытания, добавление нагрузки, проверка интерфейсов, обновление документации и перенос опыта на следующую конфигурацию.
Такой подход помогает не начинать каждый проект с нуля. Команда сохраняет проверенные решения и меняет только те части, которые требуются под новую миссию.
Модульность часто понимают слишком поверхностно.
Для модульной архитектуры нужны:
Практический вывод: модульная архитектура полезна, когда она снижает стоимость изменений. Для этого нужны не лозунги, а управляемые интерфейсы, тесты и документация.
Популярная статья
Интеграция автономной системы БАС объединяет платформу, сенсоры, бортовое ПО, связь, испытания и эксплуатационный сценарий.
Популярная статья
Самолётная схема и VTOL решают разные задачи: выбор зависит от маршрута, площадки, полезной нагрузки и требований к эксплуатации.



