










Популярная статья
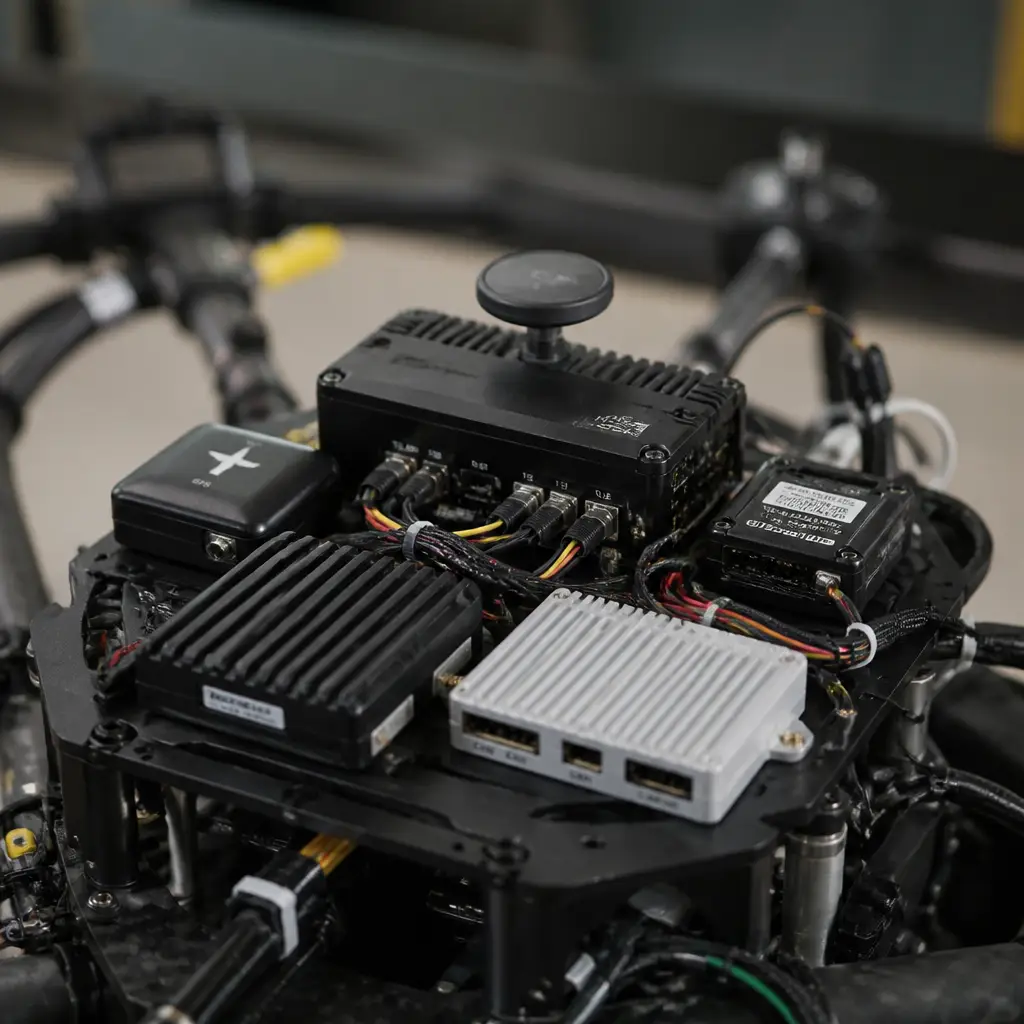
Интеграция автономной системы БАС объединяет платформу, сенсоры, бортовое ПО, связь, испытания и эксплуатационный сценарий.
Содержание статьи

Автономная навигация БАС нужна не для того, чтобы полностью убрать человека из процесса, а чтобы снять с оператора рутинные действия и оставить ему контроль над целями, безопасностью и нестандартными ситуациями.
Если автономность реализована правильно, оператор меньше занят ручным пилотированием, стабильнее получает данные и быстрее реагирует на события. Если неправильно — система становится непрозрачной и создаёт новые риски.
Сначала нужно понять, какие действия оператора действительно нужно автоматизировать: удержание маршрута, повторяемую съёмку, обход точек, контроль высоты, возврат, адаптацию к ветру или обработку событий от полезной нагрузки.
Контур автономии включает планировщик миссии, автопилот, навигационные датчики, полезную нагрузку, бортовую диагностику, связь и интерфейс оператора.
Ограничения автономии связаны с качеством данных, предсказуемостью среды и прозрачностью решений.
В рабочей миссии оператор задаёт цель, проверяет готовность, запускает маршрут, контролирует статусы, получает события и вмешивается только при отклонениях или изменении задачи.
Чем понятнее статусы системы, тем меньше когнитивная нагрузка. Оператор должен видеть, что делает БАС, почему он это делает и когда требуется решение человека.
Ошибки автономизации появляются из-за чрезмерной веры в автоматический режим.
Перед внедрением автономной навигации проверьте:
Практический вывод: автономная навигация снижает нагрузку на оператора, когда человек управляет задачей, а система берёт на себя повторяемое выполнение и контроль состояния.
Популярная статья
Интеграция автономной системы БАС объединяет платформу, сенсоры, бортовое ПО, связь, испытания и эксплуатационный сценарий.
Популярная статья
Самолётная схема и VTOL решают разные задачи: выбор зависит от маршрута, площадки, полезной нагрузки и требований к эксплуатации.



